The data uncertainties, often referred to as the error bars, are
critical in EM inversion since the data misfit and inversion search
directions are both scaled by the data uncertainties. The error bars are
just as important as the data! While most EM data and uncertainties are
estimated as complex numbers in data processing codes, the complex
values are often transformed into other forms for inversion (e.g.,
real, imaginary, amplitude, phase, log10 amplitude, apparent resistivity
etc). Here we provide a table showing how to correctly scale the data
uncertainties for each data type supported by MARE2DEM. For the
interested reader, we also provide a brief review of the uncertainty
propagations for the various transforms. For more details and discussion
of some of the advantages and disadvantages of the various data
scalings, see [WCK15].
When computing \(\phi\), you should use the \(\it atan2(y,x)\)
function since it returns the four-quadrant phase whereas the \(\it
atan(y/x)\) function is restricted to \(-\pi \le \phi \le \pi\).
Also, when dealing with real data, we generally convert phase into
degrees:
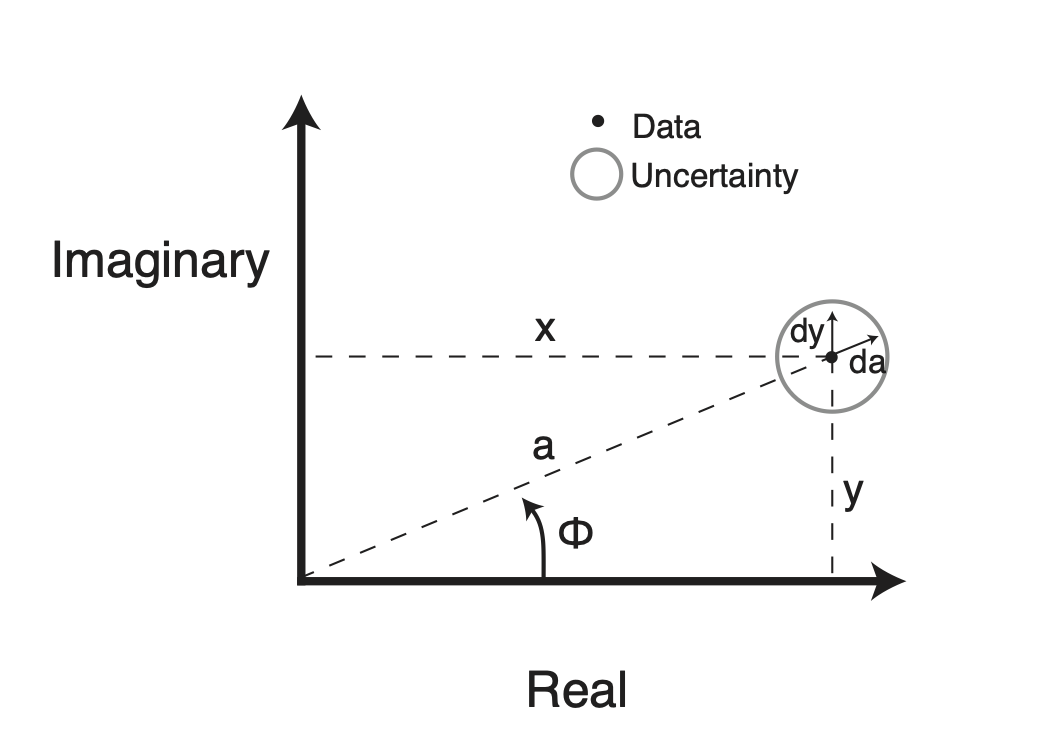
For complex data \(z = x + i y\) where x is the real component
and y is the imaginary component, the standard error \(\sigma\)
is generally assumed to be isotropic so that \(\sigma = \delta x =
\delta y\). Isotropic error means that z has a circle of uncertainty
around it in the complex plane as shown in Fig. 43.
Fig. 43 Isotropic uncertainty in the complex plane
For CSEM data, z is the complex electric or magnetic field at a given
frequency. For MT data, z is a component of the MT impedance tensor
(or a component of the tipper vector) at a given frequency. In both
cases, complex data z is what is output from the EM response
estimation code that process the time series data.
MARE2DEM allows us to invert the data as a complex quantity, but often
we find it more intuitive to look at the data in amplitude and phase
form, or log(amplitude) and phase. In the case of MT, the apparent
resistivity form is much easier to comprehend visually than the complex
data z. When inverting CSEM and MT responses with a large dynamic
range (i.e. spanning multiple orders of magnitude), there are some
stability advantages to treating the data as log10(amplitude); see
[WCK15].
Given a data scaling transform, we have to know the associated data
uncertainty transforms. Suppose q is the transformed version of the
original complex data z. Thus \(q \equiv q(x,y)\). For example,
q could be the amplitude, phase, log(amplitude), apparent resistivity,
a polarization ellipses parameter, etc. For computing misfits during
modeling and inversion, we need to know the uncertainty \(\delta
q\). This can be found using the standard method for linear propagation
of errors, which uses a first-order Taylor’s series expansion. Assuming
the variables x and y are independent with standard error
\(\sigma\), the first-order variance propagation formula is
\[\begin{eqnarray}
\delta l &=& \frac{1}{\ln(10)} \frac{\sigma }{a} = 0.4343 \frac{\delta a }{a} .
\end{eqnarray}\]
This shows that the standard error for the log10 scaled amplitude is
just a scaled version of the relative amplitude error \(\frac{\delta a
}{a}\). So if we say the data has 1% error in amplitude, the standard error
of the log10 amplitude is then 0.004343.
It can also be helpful to think of visualizing the error bars on a log10
scaled plot of the amplitudes. The formula above shows that if the data
have a fixed relative error, the error bars on the plot will all have
the same vertical length, regardless of the data values.
which is twice the relative error in the impedance, where the factor of two is due to the apparent resistivity
being proportional to the square of the impedance magnitude.
So for 1% relative error in amplitude (\(\frac{\delta a }{a}\)), the
corresponding phase error \(\delta \phi\) is then 0.573º. Note also that the last term on the right
shows the phase error for MT data will be half the relative error in apparent resistivity.
In Fig. 43 you can see that this result makes
sense, since small changes in \(\phi\) will scale with \(\frac{\delta a
}{a}\).
The uncertainty propagation analyses above relied on a first-order
Taylor’s series expansion that implicitly assumes \(\sigma <<
|z|\), in other words it assumes that the uncertainty is much smaller
than the data amplitude. The formulas for transformed uncertainties
break down when the uncertainty grows too large. See [WCK15] for an
in-depth analysis of the break-down. Hence, data with large errors (say
greater than 50% or so) should generally be omitted from the inverted
data set given issues with propagating the error; furthermore very noisy
data probably doesn’t help the inversion resolve conductivity so it can
have little useful value, that is unless the noisy data are all you have
to work with.